

Advanced Dynamic Positioning for ROV Operations
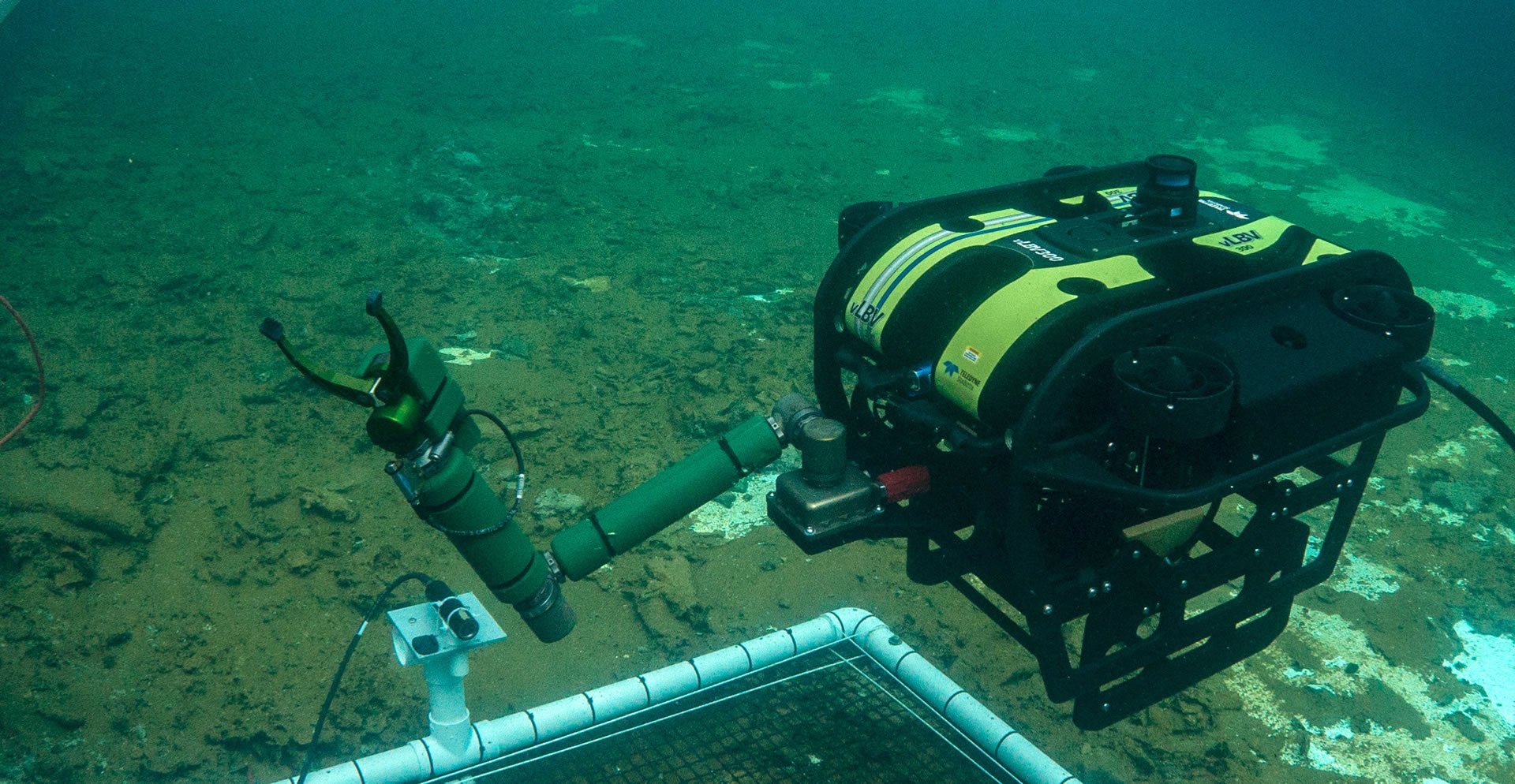
With stability being of paramount importance, CoPilot is the ideal solution to navigate a Remotely Operated Vehicle (ROV) through challenging and complex subsea environments. Designed to make the most demanding operations more efficient, our ROV autonomy system permits pilot-controlled capabilities, whilst providing automated sonar tracking and precise movement relative to a target.
CoPilot has led the way in the oil and gas industry for ROV dynamic positioning in successful surveys, field development, and pre and post lay operations. In Explosive Ordnance Disposal (EOD) and Mine Countermeasure Missions (MCM), the same technology provides capability for port inspection, target identification, mine disposal, and hull and harbour inspection tasks.
Key Features
With its straightforward, intuitive point and click interface, CoPilot is an effective tool for subsea inspection and intervention operations, allowing the pilot to easily navigate an ROV.
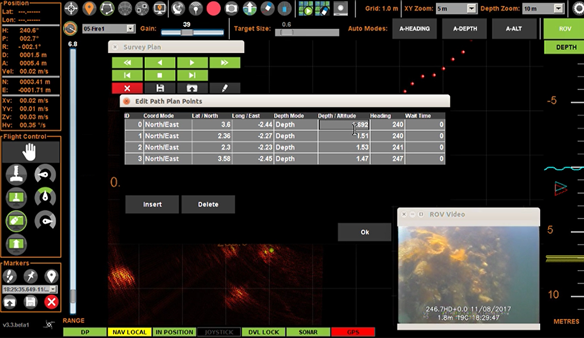
CoPilot enables semi-autonomous, pre-programmed operations, with precise navigation and stop and hover capabilities.

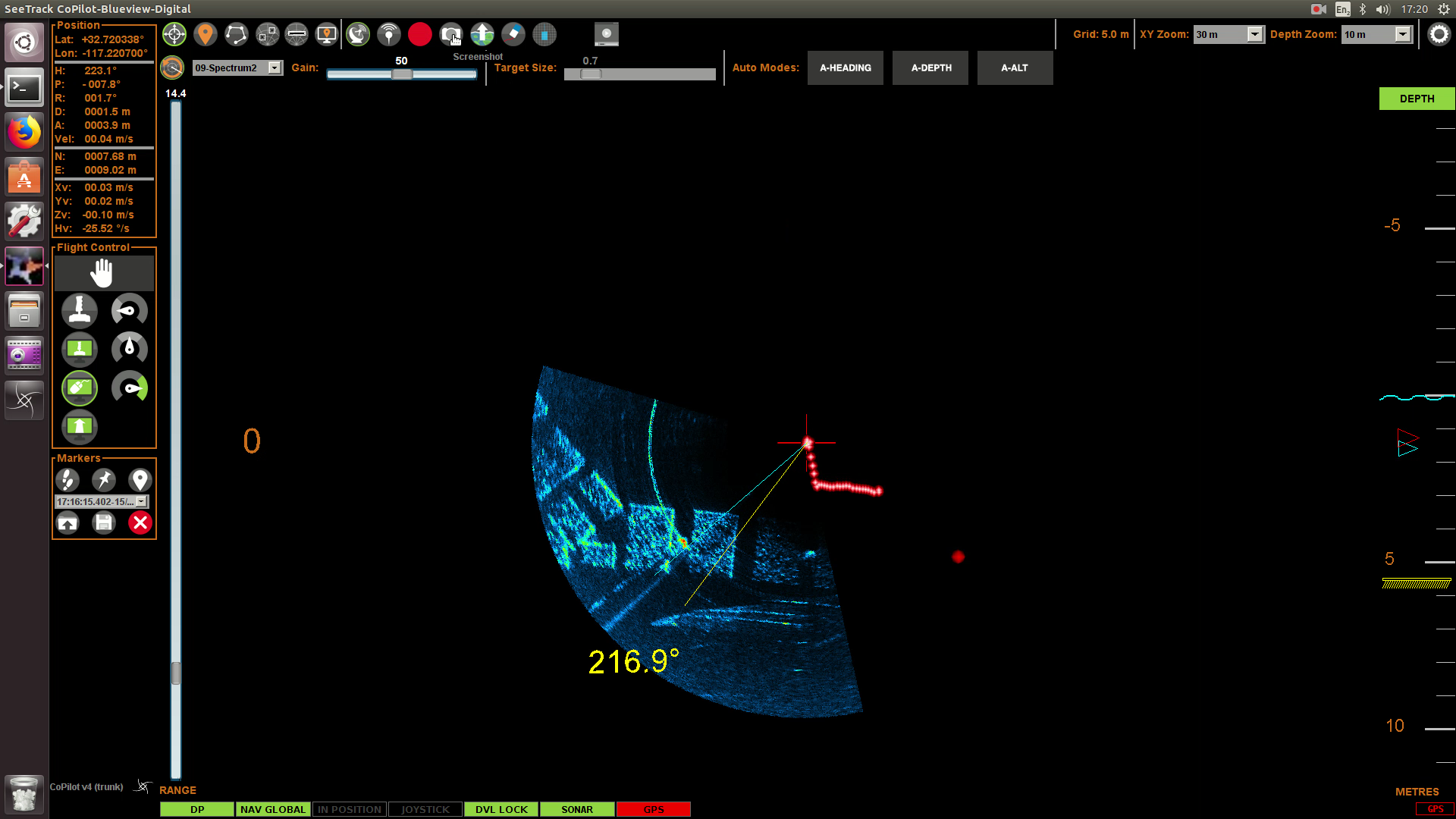
Combined with a Multi-Beam Imaging sonar (MBI), CoPilot enables an ROV to ‘lock on’ to a moving target. Even in harsh subsea conditions, the ROV can inspect objects of interest with great precision.
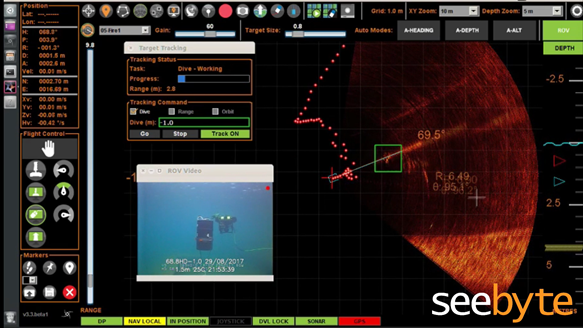
CoPilot’s interface provides real time tracking and sonar data to support planning and monitoring of the whole operation. Control the exact position, speed, and depth of the ROV at the click of a mouse.
CoPilot's provides a wide range of flight modes for full ROV Dynamic Positioning (DP). This flexibility allows for unplanned subsea interventions with minimal errors and downtime.



Additional Behaviours
All of our products are designed to help manage unmanned maritime systems, ultimately providing situational awareness across all assets within the battlespace. CoPilot's additional behaviours provide autonomous solutions allowing the user to focus on the sonar data and mission monitoring process.
With a single click, the ROV will perform a fully automated inspection around a target. The behaviour ensures that the ROV and its sensors are kept pointing towards the target while keeping a set distance.
This behaviour automates the task of performing an inspection of the side of a ship hull. The pilot can specify a distance for the ROV to stay from the hull and whether to perform a vertical or horizontal inspection. The ROV then autonomously performs the inspection enabling the operator to focus on viewing the sensor data.
The Vertical Survey behaviour automates the task of surveying a vertical pillar or harbour wall. The pilot can specify a distance for the ROV to stay from the pillar or wall. The ROV then autonomously performs the inspection enabling the operator to focus on viewing the sensor data.
The Target behaviour automates the task of having the ROV follow a moving target. The pilot can specify a distance that the ROV should maintain from the target. The ROV then autonomously keeps that distance from the target as it moves.
