ONR Fund SeeByte and MIT Multiple Autonomy Collaboration Project
SeeByte and the Massachusetts Institute of Technology (MIT) have joined forces to explore the feasibility of combining multiple autonomy architectures onto a single autonomous platform to produce the most capable unmanned system.
As unmanned systems are now routinely deployed to carry out a wide variety of tasks, the need for adaptable and extendable systems is increasing.
The research and development project, funded by the Office of Naval Research (ONR), will investigate the most suitable approach for combining two of the most widely used autonomy architectures: SeeByte’s Neptune and MIT’s MOOS-IvP. The approach will allow capabilities from both autonomy architectures to be leveraged concurrently based on the mission requirements.
SeeByte’s Technical Program Manager, Pierre-Yves Mignotte, said,
"To date most research in Autonomy has focused on developing new behaviors to control the vehicle or sensor processing algorithms to improve the robot’s perception of its environment. As a result, researchers have focused their development around the use of single autonomy architecture. This project is a great opportunity to shift the focus towards multi-autonomy architecture to produce the most efficient system for the maritime industry."
Michael Benjamin, Research Scientist at MIT, said “A primary goal of the MOOS-IvP open source marine autonomy software project is to empower the end user with greater options for performing missions and extending mission capabilities. The ability to simultaneously run different autonomy architectures on a single vehicle, within a single mission, has the potential to unleash even more autonomy capabilities available to the user.”
SeeByte’s Neptune and MIT’s MOOS-IvP offer extendable autonomy architectures and have been used in collaborative unmanned systems demonstrations worldwide. By combining these platforms, the research hopes to develop multi-autonomy architecture concepts that are capable of balancing the variable levels of autonomy and the coordination of behaviors, which in turn will enable a quicker transition of research technology to the fleets.
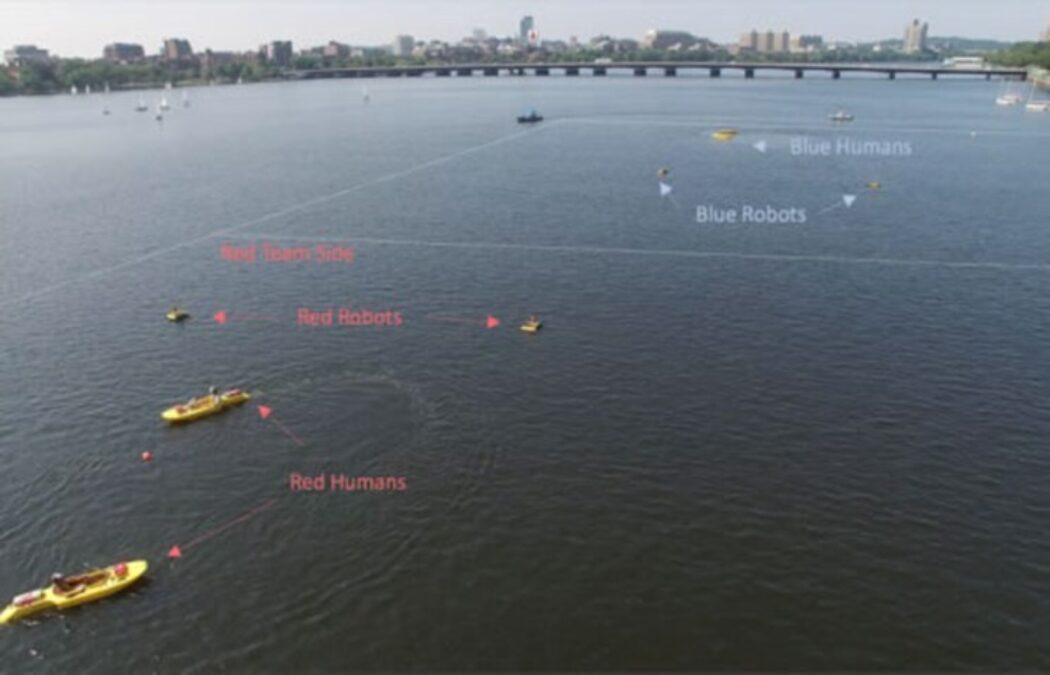
MOOS-IvP autonomy system & human-machine teaming put into practice at the MIT facilities.
Courtesy of Massachusetts Institute of Technology